Characteristics of DC Motor | Torque Speed Characteristics
Characteristics of DC motor is crucial for us electricians to learn because of how vast their applications are in various purposes.
Almost every mechanical action we witness in our environment is powered by an electric motor. Electric machines are a type of energy converter. Electrical energy is converted into mechanical energy by motors.
Hundreds of items that we use every day are powered by electric motors. Motors are available in a variety of sizes. In the industry, massive motors capable of carrying loads of 1000s of Horsepower are commonly used.
Elevators, electric trains, hoists, and heavy metal rolling mills are all examples of huge motor usage. Automobile motors, robotics, hand power tools, and food blenders are all examples of small motor applications.
Micro Machines are electric machines with parts the size of red blood cells that have a wide range of medical applications.
Electric motors are divided into two categories: DC (Direct Current) and AC (Accurate Current) (Alternating Current). There are various varieties within these categories, each with its own set of capabilities that are well suited to specific applications.
Electric motors, regardless of type, are made up of a stator (stationary field) and a rotor (rotating field or armature) that produce rotational speed and torque through the interplay of magnetic flux and electric current. DC motors differ from other types of motors in that they may run on direct current.
Different types of D.C. motors exist, however they all operate on the same principles. We’ll look at their essential principles of operation and characteristics in this chapter.
It’s critical to comprehend motor properties so that we may select the best one for our needs.
Make sure you also read the parts of a DC motor to understand fully what parts we are talking about.
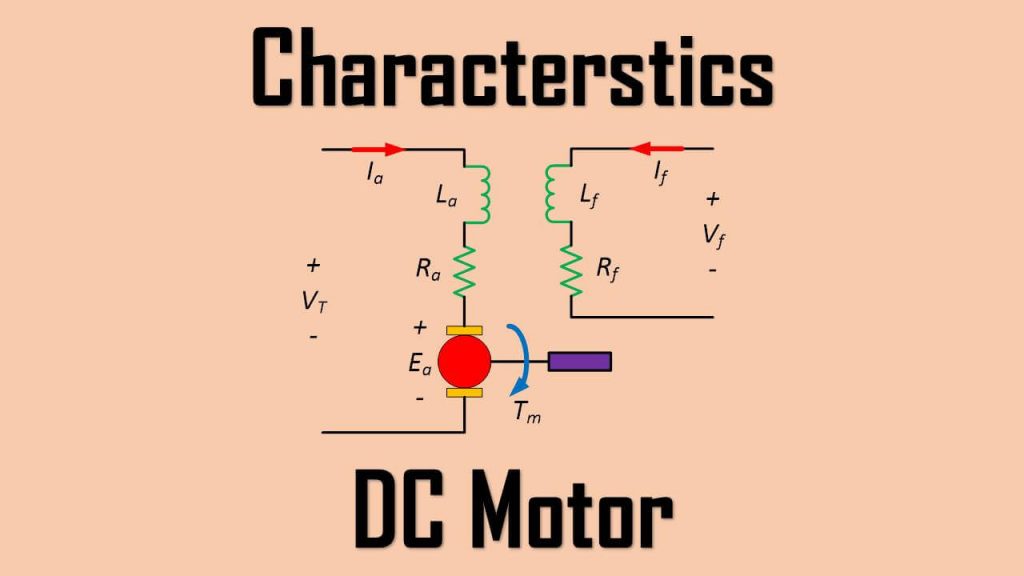
Electrical Circuit of a DC Motor
There are two properties of this type of dc motor:
- The armature and field windings are separated from each other, electrically.
- Both armature and field windings are supplied by separated DC sources.
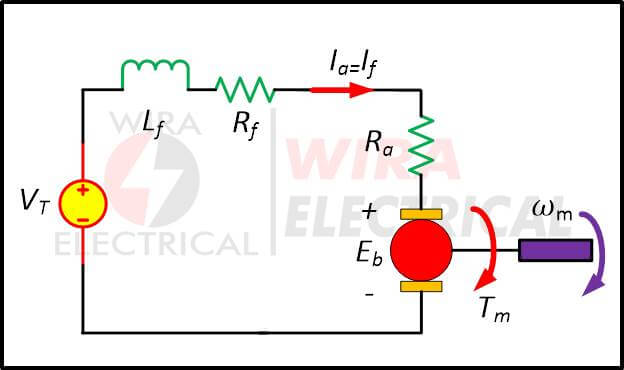
The electrical circuit of this DC motor is shown below:

Where:
Vf = voltage applied to the field winding
If = current flowing in the field winding
Lf = inductance of field winding coils
Rf = resistance of field winding coils
VT = voltage applied to the armature winding
Ia = current flowing in the armature winding
La = inductance of the armature winding coils
Ra = resistance of the armature winding coils
Ea = induced voltage in the armature
Tm = torque of the motor
Now we are analyzing the circuit in steady-state, thus the d/dt for inductance is zero.
In steady state, the voltage in the stator (field):
![]()
In steady state, the voltage in the rotor (armature):
![]()
In DC motor, induced voltage Ea is also known as back-emf because it is affected by the speed of the motor (Ꞷr),
![]()
Where
K1 = armature constant
Ꞷr = speed of the motor
Substitute (1.3) to (1.2) produces
If the value of Ra is small enough to be ignored, then

The torque needed to rotate the rotor can be calculated from:

Where:
Tm = torque of the motor (N-m)
Pout = output power of the motor (watt)
Ꞷr = speed of the motor (rad/s)
DC motor can also act as a DC generator if the armature is moved by external energy, producing electricity in the process. This one can be called a prime mover.
Types of DC Motors
There are two types of DC motors:
- Separately excited DC motor
- Self excited DC motor
The separately excited DC motor is shown above along with its equation. As its name implies, this motor has two voltage sources to supply the armature and field windings separately.
We will learn about it again further in the next section.
The self excited DC motor, the other way, only has one voltage source to supply both armature and field windings. This type can be divided further into:
- Shunt DC motor
- Series DC motor
- Compound DC motor
Characteristics of DC Motor (Separately Excited)
This motor has characteristics of:
- The armature (rotor) and field (stator) windings have to be supplied by voltage separately, thus we need two DC voltage sources electrically separated from each other.
- The armature and field windings are separated electrically.

Torque Speed Characteristics
Before jumping into the characteristic curve, there is step-to-step calculation.
The induced voltage is given by:
![]()
The torque generated in the armature can be calculated from:
![]()
From the Equation.(2.2) ,the armature current is:
Substituting Ia in the Equation.(2.1) produces

Thus, the torque generated in the armature can be found from

From the equation below we can draw the characteristic curve below with torque speed relationship. If we constantly maintaining the terminal voltage (VT) and the flux (𝝓) values then we will get linear dropping line.
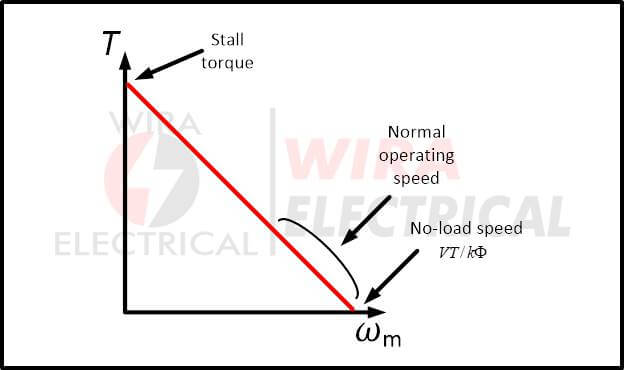
From the torque speed characteristics curve above, we can list some important notes about separately excited DC motor:
- The torque is inversely proportional to the speed of the rotor.
- Stall torque is the maximum torque but the rotor is not rotating.
- No-load speed is the maximum speed of the rotor when there is no torque applied to the rotor.
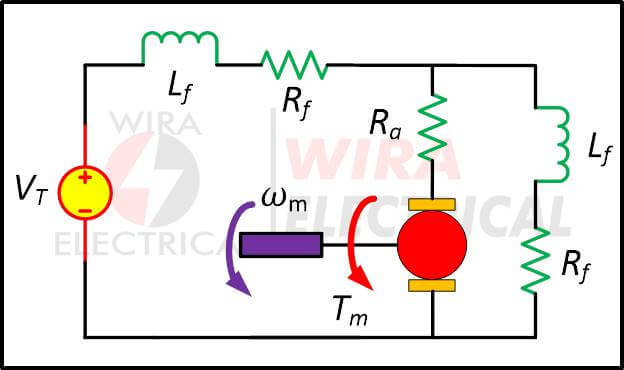
Characteristics of DC Motor (Shunt)
This motor has characteristics of:
- The armature and field windings are connected in parallel.
- Only one voltage source is needed to supply both armature and field windings.

The total current drawn from the supply will be, IT = If + Ia.
The total input power is VTIT
Torque Speed Characteristics
This motor relatively has constant torque in a wide range of speed.

The torque speed characteristics and equation for shunt DC motor is the same with the separately excited DC motor.
Help yourself to scroll up a bit.
Characteristics of DC Motor (Series)
This motor has characteristics of:
- The armature and field windings are connected in series.
- Only one voltage source is needed to supply both armature and field windings.
The current in the field winding is the same as the current in the armature winding.
Series motor has a special trait that we can apply AC or DC voltage to it. Even if we reverse the supply’s polarity, the motor will always rotate in the same direction.
This is why a series motor is called a universal motor. Of course we will use DC voltage here.
Torque Speed Characteristics
The series DC motor can be analyzed with the same approach as the shunt motor.
The torque generated by the rotor is
![]()
Assume that the flux is proportional to the field current,
![]()
In series motor, If = Ia
![]()
Where Kf is a constant (depending on the number of turns of the field winding, geometry of magnetic circuit, B-H characteristics of an iron).
Thus, the motor generate the torque as

We will ignore the Lf in the steady-state condition, then we use KVL to the equivalent circuit,
![]()
And we have induced voltage:
Substituting this equation to the Equation.(3.3)
The torque generated:

From the equations above, we can draw the torque speed characteristics curve for a series DC motor.

From the curve above, the series DC motor is capable of moving a heavy load with low speed. This motor has high torque at low speed and low torque at high speed.
Characteristics of DC Motor (Compound)
Compound DC motors use both series and shunt field windings. Just like stated above, the one field winding is connected in series to the armature, and another one field winding is connected in parallel to the armature.
We will have two types of compound DC motor:
Cumulative compound : the produced flux from both series and shunt windings have the same direction.
Differential compound : the produced flux from both series and shunt windings have different directions.


Fine